
Également en cliquant sur le bouton ci-dessous, vous pourrez trouver le site utilisé pour compléter l’histoire de la création des drones. Ce site nous a été très utile afin de nous informer.
Remerciements
Nous souhaitons par la présente, notre professeur encadrant, Monsieur DEVALETTE pour nous avoir conseillés, accompagnés et éclairés durant la réalisation de ces travaux.
Nous remercions nos familles pour nous avoir soutenu tout au long de ces six derniers mois
Les différents types de drones
On peut noter que depuis l’apparition des premiers drones, beaucoup d’autres très différents ont vu le jour .
Drone « jouet »

On peut noter les aéronefs qui sont adaptés à un usage public : ils sont donc réservés à un cadre de loisir, pour voir le monde d’une autre façon. Il servent aussi à apprendre les bases du pilotage : on pourrait peut être alors les qualifier de drones « jouets ».
Drone minuscule

On peut aussi noter la présence sur le marché de drones de plus en plus petits pouvant accueillir une caméra. Ces derniers sont pilotables grâce à un smartphone étant capable de recevoir les informations émis par le drone .
Drone de courses

De nouvelles disciplines ont vu le jour depuis la « vulgarisation » des drones, comme par exemple ici les drones de courses, ou les drones souvent modifiés pour être apte à aller plus vite lorsqu’ils sont utilisés. On appelle ces drones des drones de compétition ou bien des drones de « FPV Racing ». Ainsi, des drones modifiés foncent à pleine allure dans des parcours d’obstacles très compliqués. Des casques de réalité augmentée sont souvent utilisés dans ces compétitions afin que les pilotes bénéficient d’une meilleure immersion .
Drone professionnel

Certains drones de nos jours sont destinés à des usages entrant dans le domaine du professionnel, comme par exemple la surveillance des plages, la livraison de colis ( se rapprochant de notre sujet de TPE), le sauvetage de victime de la noyade (où le drone serait alors capable de déployer une bouée de sauvetage afin de venir au secours de l’individu). Certains projets à Madagascar parlent même d’agriculture faite grâce au drone. Cependant, on peut noter que les drones étant déclarés comme professionnels doivent respecter les lois (seuls les drones professionnels peuvent survoler des agglomérations) et doivent être homologués à la DGAC (Direction Générale de l’Aviation Civile ). Il existe alors différentes tailles de drone subvenant à différents scénarios et à la qualification du pilote .
Les drones militaires

On peut enfin noter même si nous connaissons ce type de drone grâce à l’historique de ces derniers que le drone militaire existe et est une arme aujourd’hui très dangereuse (ces derniers étant furtifs et armés). Les drones militaires ne respectent pas ainsi la même législation que les drones professionnels ou autres.
L’ Histoire Du Drone
Le concept à l’origine du drone est apparut à la fin de la Première Guerre Moniale.
En France, Georges Clemenceau démarre un concept d’avion sans pilote tandis qu’au États-Unis le projet Hewitt-Sperry automatic airplane apparait.

Un certain Max Boucher invente un système de pilotage automatique qui fait voler un avion BN3
Le terme « drone » est seulement apparut dans les années 1930 au Royaume-Uni. Le premier drone français stricto sensu a été conçu en 1924 par Maurice Percheron : à l’époque le drone n’avait pas encore d’intérêt militaire.

C’est seulement durant la Guerre Froide que le drone a connu son moment de gloire dans les armés.

Enfin depuis quelque années, le drone est adapté à une utilisation civile.
Présentation du TPE
Tout d’abord, nous allons nous présenter.
Nous sommes un groupe composé de trois personnes : Mathieu Andriamirao, Mahenina Randriamalala et Mathieu Hubail. Le choix de travailler sur un drone nous a paru idéal car nous trois dans nos futurs carrières voudrions nous orienter vers l’aéronautique.
Nous avons commencé notre TPE par le choix du thème qui est : Transfère et transport. Ensuite, nous avons réfléchi à comment intégrer un travail sur les drones dans ce sujet. Nous sommes donc parvenus à « Comment un drone peut-il voler d’un point A jusqu’à un point B? »
Dans cette problématique, plusieurs notions sont abordées : tout d’abord, comment le drone fait-il pour voler et aussi comment le drone peut-il aller d’un point à un autre?
Notre sujet se base sur deux matières qui sont la physique ainsi que la technologie. Nous avons étaient encadré par Monsieur Devalette qui enseigne ces deux matières (physique-chimie et ICN).
Dans un premier temps, nous allons vous parler des drones et de leur historique, puis des différents mouvements du drone et dans un deuxième temps nous allons nous intéresser à la programmation de drones.
Le projet au long terme
L’idée d’un drone autonome pouvant transporter des colis étant une idée provenant de l’entreprise Amazone comme nous pouvons le voir ici, on reprit l’idée en nous demandant comment cela aurait été possible .
Le projet repris au long terme aurait été de créer une compagnie de transport de colis par drone, palliant ainsi au problème d’environnement et de temps car certains drones peuvent être plus rapides qu’un livreur et moins polluant qu’une voiture .
Notre société fictive se nommerait alors « Amadrone », qui ferait ainsi référence à la société amazone, mais on entendrait aussi « mad » pour Madagascar et ainsi, drone ferait référence aux domaines dans lesquels nous ferions notre commerce.
Programmation du drone
Pour programmer le drone, on utilisa alors un module de commande étant le traducteur du langage sortant de scratch, ce langage étant en C++ et le drone comprenant le Javascript. Ainsi, nous avons pu programmer le drone à partir de Scratch.
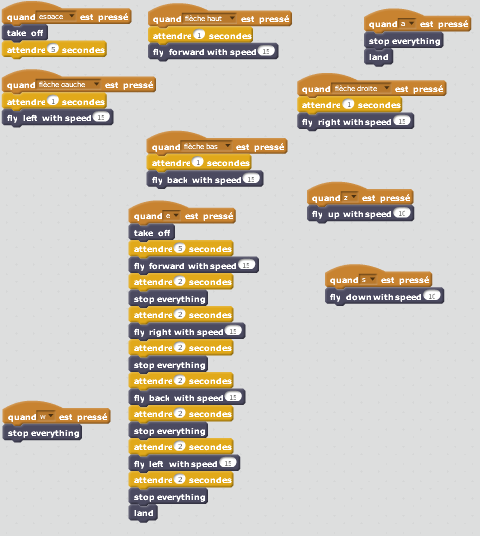
Notre stratégie était simple: on assigna à chaque touche directionnelle la commande d’une direction, ainsi flèche gauche permettait d’aller à gauche avec le drone puis flèche droite vers la droite et ainsi de suite. On fit alors grâce à ce procédé un carré. On prit ensuite les blocs utilisés pour faire ce carré, puis on les mit bout à bout : on obtint à la fin un programme décrivant le chemin d’un carré.
Vous pouvez consulter ici les détails de notre programmation
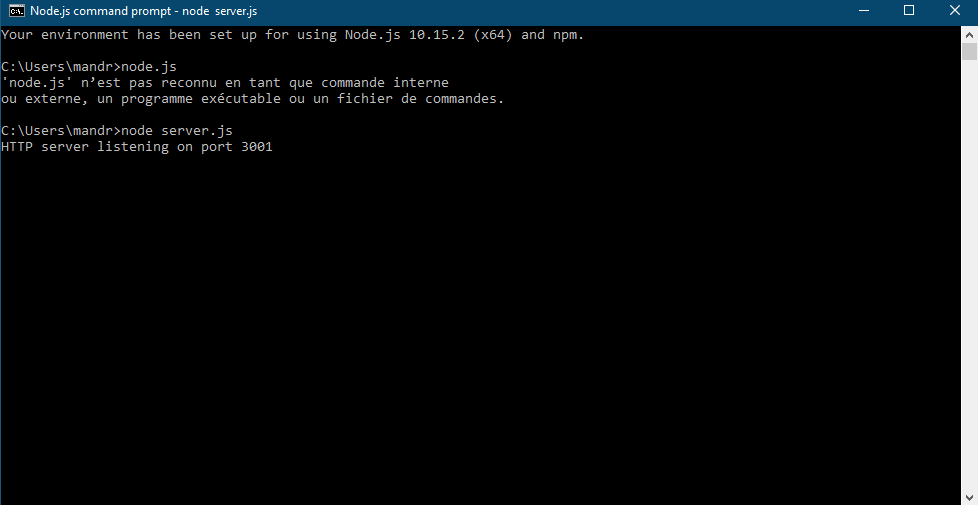
Voici ci-dessous le module node.js qui traduisait en temps réel les informations données par scratch.
Les différents mouvements du drone
En regardant le drone voler, nous pouvons décomposer chaque mouvement du drone afin qu’il puisse suivre la trajectoire demandée.
Nous observons le premier mouvement :
La montée du drone
Pour monter, la vitesse de rotation des moteurs, étant reliés aux hélices, augmente. Nous appelons cela l’équilibre des vitesses.
Nous trouvons ainsi la formule :
(w1+w3)-(w2-w4)=0
w étant le nom des moteurs.
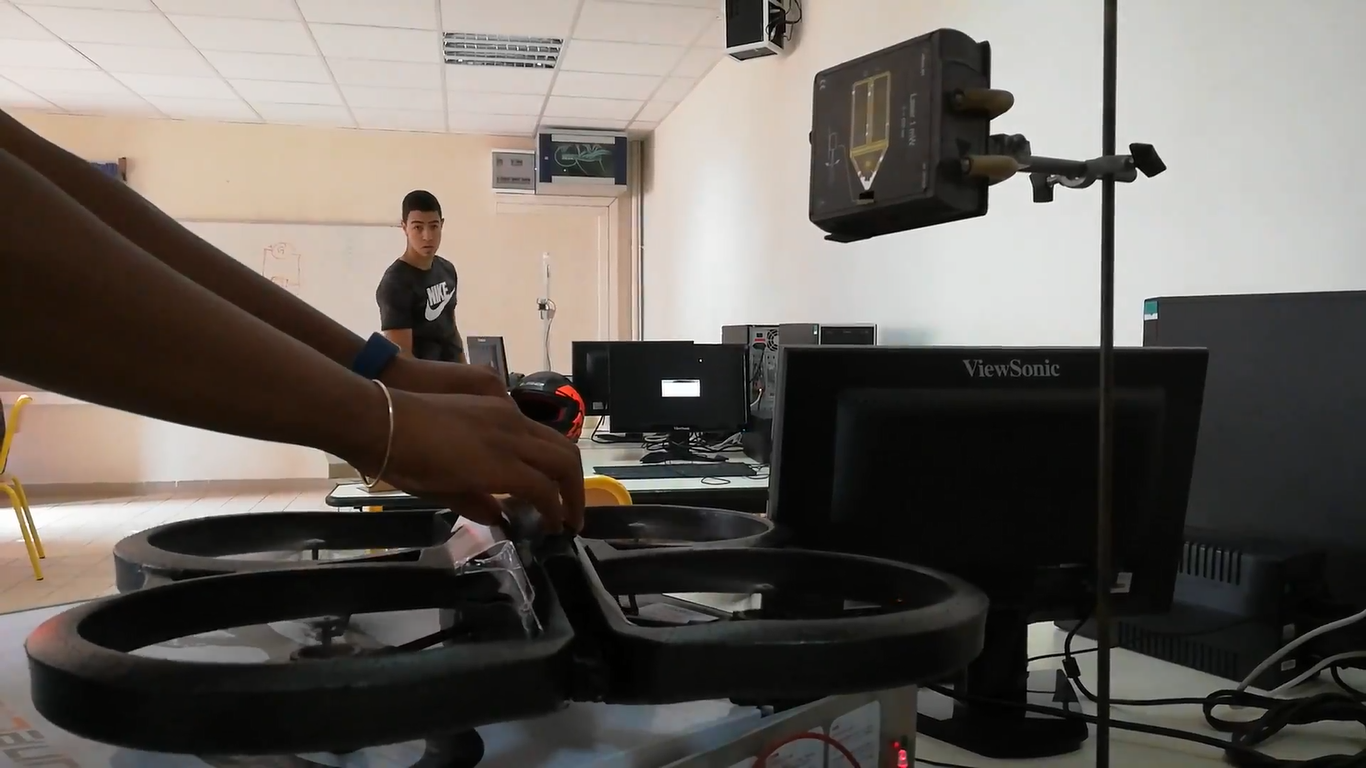
Nous avons ainsi mesuré la force s’exerçant sur le drone au décollage à l’aide d’un dynamomètre .


La force mesurée est de 1.2 newtons, ce qui nous permet de dire que le poids maximum que peut porter le drone tout en gardant sa stabilité est de 0.5 newton, soit 50 grammes.
Ensuite, nous avons ainsi mesuré la vitesse des hélices au moment du décollage.
À l’aide d’un laser et d’un photorécepteur, nous pouvons voir sur un logiciel combien de fois le faisceau lumineux a été coupé .
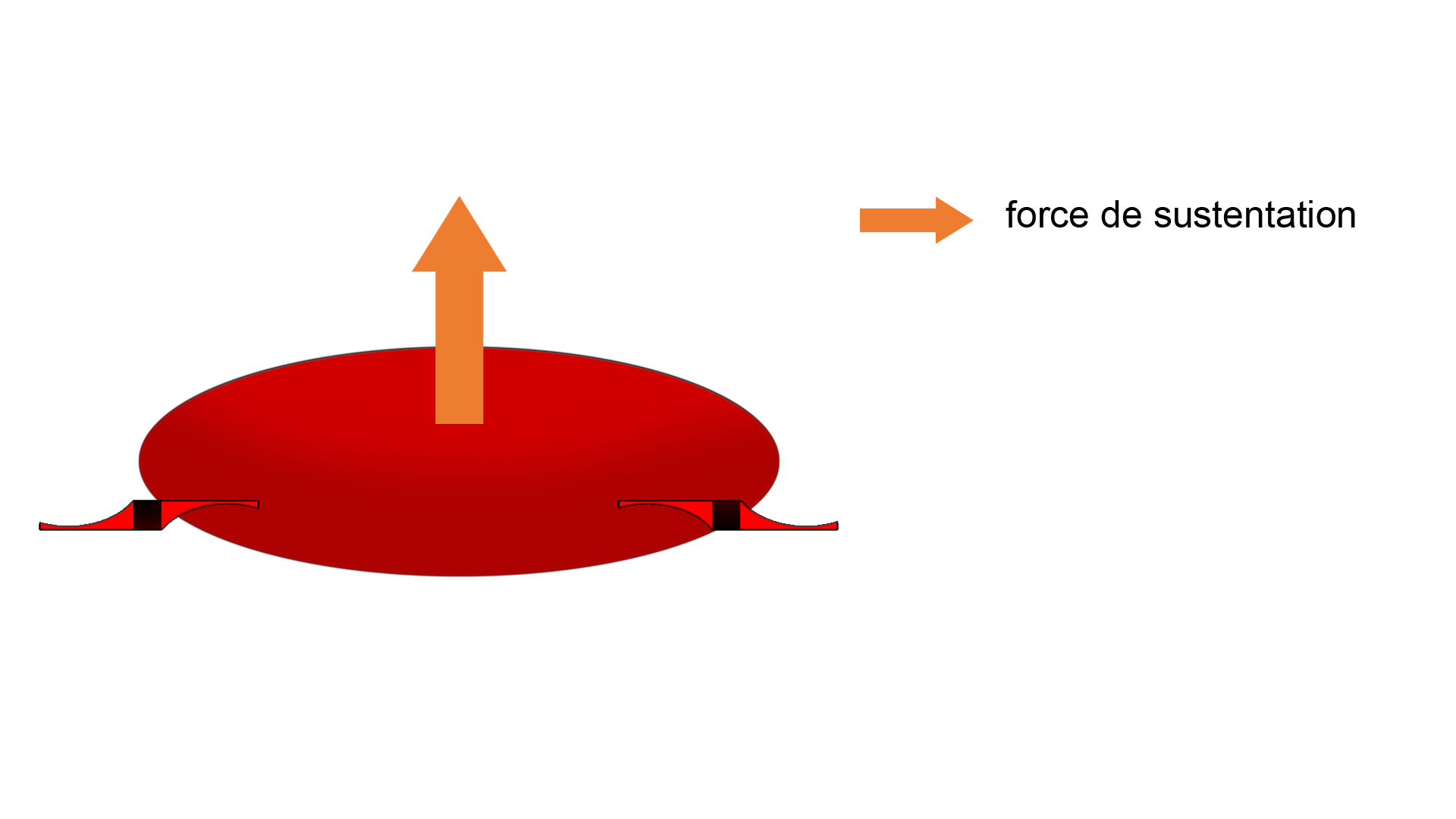
Vol stationnaire
Le drone monte grâce à une force se nommant la force de sustentation. C’est une force qui maintient le drone à une distance au dessus d’une surface sans que il y est contact avec cette dernière .
Avancée du drone
Pour l’avancée du drone on diminue la vitesse des moteurs avant et proportionnellement à cela on augmentera la vitesse de rotation des moteurs arrières.

Recul du drone
Pour le recul du drone on utilisera le même procédé que précédemment : les moteurs arrières baisseront de vitesse de rotation et les moteurs avant augmenteront de vitesse de rotation .

Notre choix et notre problématique
Notre sujet est en relation avec notre orientation future, Mathieu Hubail voulant travailler dans l’armée de l’air et Mahenina ainsi que moi-même voulant travailler en tant qu’ingénieur dans l’aéronautique .
Notre premier sujet fut d’abord le vol des drones avec une batterie au citron: on savait alors qu’il était possible de faire de l’électricité à partir de la substance acide que contenait les citrons. Ces derniers après l’utilisation de leur énergie auraient été placé dans des compostes afin de créer un engrais suffisant pour planter et cultiver d’autres citrons. Ce sujet était impossible selon notre encadreur de TPE, car cette énergie aurait été trop faible et le poids des citrons trop important pour le drone .
On décida finalement de se rabattre sur le vol des drones en général, ce sujet n’étant ainsi pas éloigné de nos orientations futures. On fixa comme problématique:
Comment envoyer un drone d’un point A à un point B?
Nous allons donc voir deux volets : physique et informatique systèmes numériques pour répondre à cette problématique.
Dans un premier temps nous allons vous parler des drones et de leur historique, puis des différents mouvements du drone et dans un deuxième temps nous nous intéresserons de la programmation de drones.
Nous pourrons alors voir l’application possible de ce projet à long terme.

{kind=link}